Robotics
The following robots, Drone, Roller Bot, and Tank Fighter, were made during my Freshman, Junior and Sophomore years of high school respectively.
Drone
The Drone was controlled using a R8FM 2.4 GHz receiver connected to a Navio2 Raspberry Pi 3 that implemented ArduPilot software. The Navio2 was also connected to a GNSS antenna and UART for telemetry. Six 910 KV brushless motors were connected to the Navio2 via six 32Bit 20A ESCs and powered by a 5000 mAh battery via XT60 PDB. The drones video feed used a separate system that transmitted AV data from a 20V FPV Camera through a 5.8G 48CH 600mW wireless transmitter, which sent the signal to a 5.8G 48CH wireless AV receiver. The Drone was built on commission through Princeton High School funding with the purpose of being used for media coverage of school events.
Telemetry & Controllers









Media



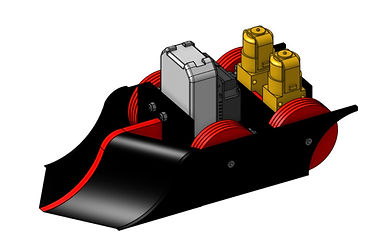
Roller Bot
The Roller bot was made during my Junior year of high school. I was the Teaching Assistant of a robotics class and built the roller bot as a fighting robot. The roller bot uses RF via Arduino for user input.
Media






Tank
The Tank was made during my Sophomore year of high school as a fighting robot for a robotics class. The tank uses RF via Arduino for user input.
Tank Fighter